A-PHP Project
Autonomous Pruning Harvesting Payload



Overview
The A-PHP (Autonomous Pruning Harvesting Payload) project was conceived with the goal of developing an innovative system for precision viticulture, especially addressing the delicate and complex phase of grapevine pruning.
Viticulture is a key sector for Italian and European agriculture, yet it faces crucial challenges: a shortage of skilled labor, rising production costs, the need to ensure environmental sustainability, and growing competitiveness in the global market.
This project aims to tackle these challenges by creating an intelligent robotic payload that, when mounted on terrestrial or aerial platforms (UGV/UAV), will autonomously recognize and select the vine branches to prune and perform cuts with precision—thus reducing the need for human intervention. The solution seeks to automate one of the most labor-intensive and repetitive operations in viticulture, freeing up resources and improving overall operational efficiency for vineyards.
Advanced Subsystems
The project plans to develop and integrate several advanced subsystems:
Computer Vision System
Using high-resolution cameras and deep-learning–based artificial intelligence algorithms, the payload will differentiate branches, leaves, and grape clusters, accurately identifying which parts of the plant require intervention.
Planning & Control Algorithms
AI software will compute the optimal trajectory and cutting modalities, ensuring both productivity and the preservation of the plant’s health.
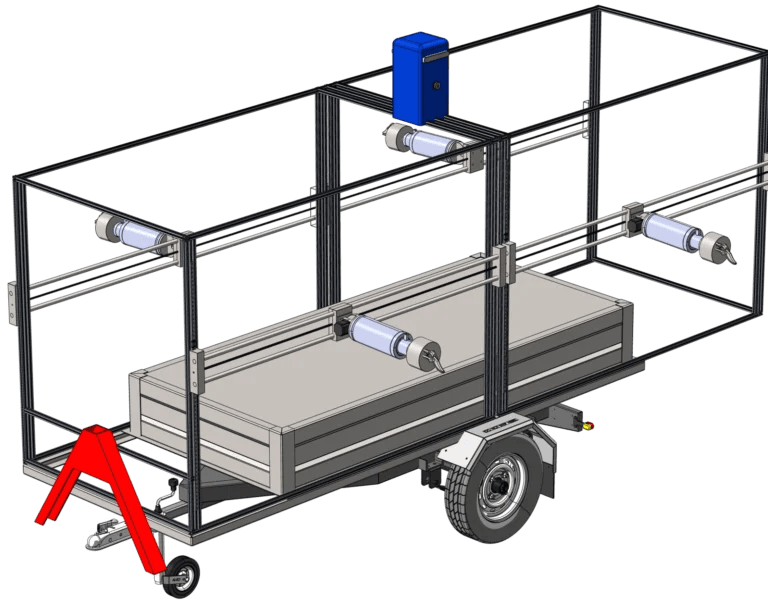
Robotic End-Effectors
Tools and cutting systems will be designed to suit the various stages of pruning, capable of rapid and precise operation in the unstructured environment of a vineyard.
Hardware/Software Integration
The system will be designed to interface with different robotic platforms, leveraging standard communication buses, safety modules, and reliable power architectures.
Operational Phases
The project is structured into several operational phases, among which:
-
Requirements Analysis: Defining the functional specifications based on the needs of vineyard operators.
-
Vision System Development: Training and validating neural networks for branch recognition and vine part classification.
-
End-Effector Design & Construction: Building prototypes capable of controlled, precise cuts.
-
Lab Integration & Testing: Validating subsystems and communication interfaces.
-
Field Trials in Vineyards: Field tests to evaluate the reliability and performance of the payload under real conditions.
Innovation
The project introduces several key innovations compared to existing technologies:
-
The combined use of artificial intelligence and advanced robotics to address a complex agricultural task like pruning.
-
The flexibility to integrate the payload on different platforms, making the system versatile and scalable.
-
A significant reduction in dependence on seasonal labor, which is often scarce and costly.
-
A sustainability-oriented approach, with potential reductions in time, energy consumption, and production costs.
Expected Impacts
The project will have impacts on multiple levels:
Economic
Lowering pruning-related costs, increasing productivity, and improving the competitiveness of agricultural businesses.
Social
Addressing the shortage of agricultural workers, reduction of heavy and potentially risky manual activities.
Technological
Development of advanced skills in robotics, computer vision, and AI applied to precision agriculture.
Environmental
Greater efficiency in resource use, reduction of waste, and more sustainable practices.
The A-PHP project marks a significant step toward the intelligent mechanization of viticulture. By combining robotics, artificial intelligence, and agronomic expertise, it aims to provide the sector with an innovative tool capable of tackling both current and future challenges.
Implementing an autonomous pruning payload will not only boost vineyard efficiency but also contribute to the broader goals of Agriculture 4.0—sustainable, competitive, and technologically advanced.